- Page 1
- Page 2
- Page 3
- Page 4
- Page 5
- Page 6
- Page 7
- Page 8
- Page 9
- Page 10
- Page 11
- Page 12
- Page 13
- Page 14
- Page 15
- Page 16
- Page 17
- Page 18
- Page 19
- Page 20
- Page 21
- Page 22
- Page 23
- Page 24
- Page 25
- Page 26
- Page 27
- Page 28
- Page 29
- Page 30
- Page 31
- Page 32
- Page 33
- Page 34
- Page 35
- Page 36
- Page 37
- Page 38
- Page 39
- Page 40
- Page 41
- Page 42
- Page 43
- Page 44
- Page 45
- Page 46
- Page 47
- Page 48
- Page 49
- Page 50
- Page 51
- Page 52
- Page 53
- Page 54
- Page 55
- Page 56
- Page 57
- Page 58
- Page 59
- Page 60
- Page 61
- Page 62
- Page 63
- Page 64
- Page 65
- Page 66
- Page 67
- Page 68
- Flash version
© UniFlip.com
- Page 2
- Page 3
- Page 4
- Page 5
- Page 6
- Page 7
- Page 8
- Page 9
- Page 10
- Page 11
- Page 12
- Page 13
- Page 14
- Page 15
- Page 16
- Page 17
- Page 18
- Page 19
- Page 20
- Page 21
- Page 22
- Page 23
- Page 24
- Page 25
- Page 26
- Page 27
- Page 28
- Page 29
- Page 30
- Page 31
- Page 32
- Page 33
- Page 34
- Page 35
- Page 36
- Page 37
- Page 38
- Page 39
- Page 40
- Page 41
- Page 42
- Page 43
- Page 44
- Page 45
- Page 46
- Page 47
- Page 48
- Page 49
- Page 50
- Page 51
- Page 52
- Page 53
- Page 54
- Page 55
- Page 56
- Page 57
- Page 58
- Page 59
- Page 60
- Page 61
- Page 62
- Page 63
- Page 64
- Page 65
- Page 66
- Page 67
- Page 68
- Flash version
© UniFlip.com
Temel Cerrahi E¤itimde Laparoskopi Simülatörleri — 553
düflük maliyetli, pratik trainerlar›n yerini, daha yüksek kalitedeki sistemler alm›flt›r.[11,12]
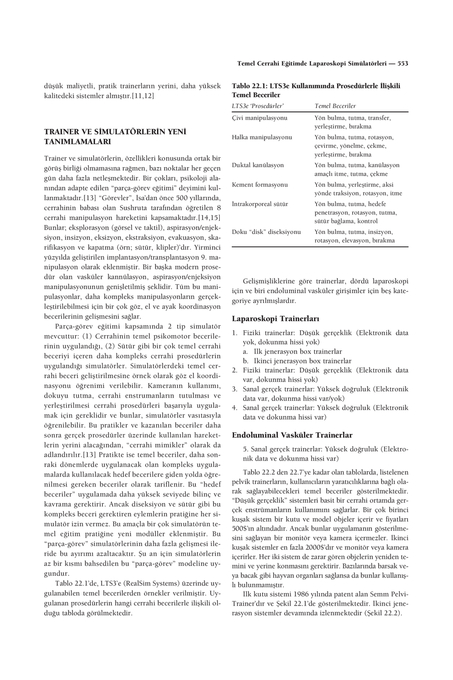
Tablo 22.1: LTS3e Kullan›m›nda Prosedürlerle ‹liflkili Temel Beceriler
LTS3e ‘Prosedürler’ Çivi manipulasyonu Temel Beceriler Yön bulma, tutma, transfer, yerlefltirme, b›rakma Yön bulma, tutma, rotasyon, çevirme, yönelme, çekme, yerlefltirme, b›rakma Yön bulma, tutma, kanülasyon amaçl› itme, tutma, çekme Yön bulma, yerlefltirme, aksi yönde traksiyon, rotasyon, itme Yön bulma, tutma, hedefe penetrasyon, rotasyon, tutma, sütür ba¤lama, kontrol Yön bulma, tutma, insizyon, rotasyon, elevasyon, b›rakma
TRAINER VE S‹MULATÖRLER‹N YEN‹ TANIMLAMALARI
Trainer ve simulatörlerin, özellikleri konusunda ortak bir görüfl birli¤i olmamas›na ra¤men, baz› noktalar her geçen gün daha fazla netleflmektedir. Bir çoklar›, psikoloji alan›ndan adapte edilen “parça-görev e¤itimi” deyimini kullanmaktad›r.[13] “Görevler”, ‹sa’dan önce 500 y›llar›nda, cerrahinin babas› olan Sushruta taraf›ndan ö¤retilen 8 cerrahi manipulasyon hareketini kapsamaktad›r.[14,15] Bunlar; eksplorasyon (görsel ve taktil), aspirasyon/enjeksiyon, insizyon, eksizyon, ekstraksiyon, evakuasyon, skarifikasyon ve kapatma (örn; sütür, klipler)’d›r. Yirminci yüzy›lda gelifltirilen implantasyon/transplantasyon 9. manipulasyon olarak eklenmifltir. Bir baflka modern prosedür olan vasküler kannülasyon, aspirasyon/enjeksiyon manipulasyonunun geniflletilmifl fleklidir. Tüm bu manipulasyonlar, daha kompleks manipulasyonlar›n gerçeklefltirilebilmesi için bir çok göz, el ve ayak koordinasyon becerilerinin geliflmesini sa¤lar. Parça-görev e¤itimi kapsam›nda 2 tip simulatör mevcuttur: (1) Cerrahinin temel psikomotor becerilerinin uyguland›¤›, (2) Sütür gibi bir çok temel cerrahi beceriyi içeren daha kompleks cerrahi prosedürlerin uyguland›¤› simulatörler. Simulatörlerdeki temel cerrahi beceri gelifltirilmesine örnek olarak göz el koordinasyonu ö¤renimi verilebilir. Kameran›n kullan›m›, dokuyu tutma, cerrahi enstrumanlar›n tutulmas› ve yerlefltirilmesi cerrahi prosedürleri baflar›yla uygulamak için gereklidir ve bunlar, simulatörler vas›tas›yla ö¤renilebilir. Bu pratikler ve kazan›lan beceriler daha sonra gerçek prosedürler üzerinde kullan›lan hareketlerin yerini alaca¤›ndan, “cerrahi mimikler” olarak da adland›r›l›r.[13] Pratikte ise temel beceriler, daha sonraki dönemlerde uygulanacak olan kompleks uygulamalarda kullan›lacak hedef becerilere giden yolda ö¤renilmesi gereken beceriler olarak tariflenir. Bu “hedef beceriler” uygulamada daha yüksek seviyede bilinç ve kavrama gerektirir. Ancak diseksiyon ve sütür gibi bu kompleks beceri gerektiren eylemlerin prati¤ine her simulatör izin vermez. Bu amaçla bir çok simulatörün temel e¤itim prati¤ine yeni modüller eklenmifltir. Bu “parça-görev” simulatörlerinin daha fazla geliflmesi ileride bu ay›r›m› azaltacakt›r. fiu an için simulatörlerin az bir k›sm› bahsedilen bu “parça-görev” modeline uygundur. Tablo 22.1’de, LTS3’e (RealSim Systems) üzerinde uygulanabilen temel becerilerden örnekler verilmifltir. Uygulanan prosedürlerin hangi cerrahi becerilerle iliflkili oldu¤u tabloda görülmektedir.
Halka manipulasyonu
Duktal kanülasyon Kement formasyonu ‹ntrakorporeal sütür
Doku “disk” diseksiyonu
Geliflmiflliklerine göre trainerlar, dördü laparoskopi için ve biri endoluminal vasküler giriflimler için befl kategoriye ayr›lm›fllard›r.
Laparoskopi Trainerlar›
1. Fiziki trainerlar: Düflük gerçeklik (Elektronik data yok, dokunma hissi yok) a. ‹lk jenerasyon box trainerlar b. ‹kinci jenerasyon box trainerlar 2. Fiziki trainerlar: Düflük gerçeklik (Elektronik data var, dokunma hissi yok) 3. Sanal gerçek trainerlar: Yüksek do¤ruluk (Elektronik data var, dokunma hissi var/yok) 4. Sanal gerçek trainerlar: Yüksek do¤ruluk (Elektronik data ve dokunma hissi var)
Endoluminal Vasküler Trainerlar
5. Sanal gerçek trainerlar: Yüksek do¤ruluk (Elektronik data ve dokunma hissi var) Tablo 22.2 den 22.7’ye kadar olan tablolarda, listelenen pelvik trainerlar›n, kullan›c›lar›n yarat›c›l›klar›na ba¤l› olarak sa¤layabilecekleri temel beceriler gösterilmektedir. “Düflük gerçeklik” sistemleri basit bir cerrahi ortamda gerçek enstrümanlar›n kullan›m›n› sa¤larlar. Bir çok birinci kuflak sistem bir kutu ve model objeler içerir ve fiyatlar› 500$’›n alt›ndad›r. Ancak bunlar uygulaman›n gösterilmesini sa¤layan bir monitör veya kamera içermezler. ‹kinci kuflak sistemler en fazla 2000$’d›r ve monitör veya kamera içerirler. Her iki sistem de zarar gören objelerin yeniden temini ve yerine konmas›n› gerektirir. Baz›lar›nda barsak veya bacak gibi hayvan organlar› sa¤lansa da bunlar kullan›fll› bulunmam›flt›r. ‹lk kutu sistemi 1986 y›l›nda patent alan Semm PelviTrainer’d›r ve fiekil 22.1’de gösterilmektedir. ‹kinci jenerasyon sistemler devam›nda izlenmektedir (fiekil 22.2).