roskoi sistemi da Vinci cerrahi sistemidir (Intuitive Surgi-
cal, Sunnyvale, Kaliforniya). Sistemin eitimi ya ihtisas
döneminde ya da mezuniyet sonrasi dönemde alinmakta-
dir. Mezuniyet sonrasi pratik eitimi ülke genelindeki
birkaç merkezden birinde alinabilmektedir. Hastane de-
recelendirme ilemleri, tipik olarak bir uzman eliinde
daha önceden belirlenmi sayida uygulama vakalarinin
yapilmasini gerektirir. Hasta için yüksek düzeyde cerrahi
hizmet salamak için, cerrah dürüstçe vaka kapasitesini
deerlendirmeli ve yeterlilik düzeyini öngörmelidir.
Robotik Ortam ve Kontroller
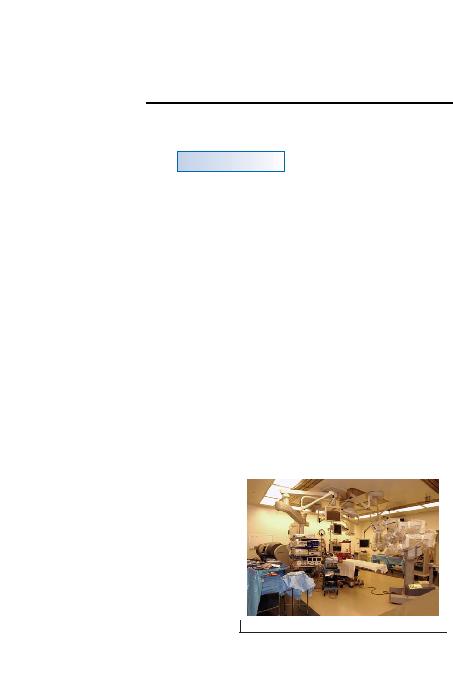
deal minimal invaziv operasyon odasi robotik ekipmanlari
yerletirecek genilikte olmalidir. Yardimci teknisyenler ve
yatak bai asistanlar için odada birkaç noktaya görüntü-
leme panelleri yerletirilmelidir (ekil 11-1). Robotik cer-
rahi ile baarinin ayrilmaz parçasi robotik takimin erken
belirlenmesidir. Etkili bir robotik takim uygun parçalarin
kurulmasi, sökülmesi ve gerektiinde onarimi konusunda
yeterli olmalidir. Teknik olarak yetenekli robotik yatak bai
asistani tekrarlayan eitim ihtiyacini en aza indirir.
rada kritik parçalar aydinlatilmitir. Robotik sistem 3 kom-
ponente ayrilir:
1.
aletlerin manüplasyonunu salar
2.
3.
aletlerin manüplasyonuna izin verir
olmak üzere 2 bölmeye ayrilir (ekil 11-2).
cerrahin 3 farkli ölçeklendirme orani seçmesine izin verir.
Varsayilan ayar "FINE" ölçeidir ve genellikle yeni bala-
yan cerrahlar için uygun olan ölçektir. "SCOPE ANGLE"
dümesi üç teleskop düzlemi arasinda deiime izin verir.
Renal prosedürler için 30 derece yukari veya aai ayar-
lama kullanilidir. Teleskop açisinin ayari lensin açisi ve
dorultusuyla uyumlu olmalidir. Sol bölmede bulunan
"SILENCE ALARMS" ve akabinde "FAULT OVERRIDE"
dümelerine nadiren sorun olmasi durumunda ihtiyaç
duyulur. Cerrahin alnini konsoldaki alin bölgesine yerle-
tirmesiyle robot aktive olur ve aletlerin aktif manüplasyo-
nuna izin verir. Daha eski da Vinci ünitelerinde, eer robot
bekleme modunda (sari "STANDBY" dümesi yanarken)
ise sa bölmedeki yeil "READY" tuuna basma ihtiyaci
olacaktir.
yonu salamasi için konsolda cerrahin dirseklerini yerle-
tirecei kol dayama yerleri bulunur (ekil 11-3). Ayak
kavrama dümesi yöneticilere tekrardan pozisyon vermek
için kullanilir.
EKL 11-1.
Robotik minimal invaziv odasi.